 Italiano
Italiano
 Français
Français  English
English 
Un salto generazionale necessario per realizzare in tempi brevi e in sicurezza le tante gallerie delle nuove linee ferroviarie Italiane
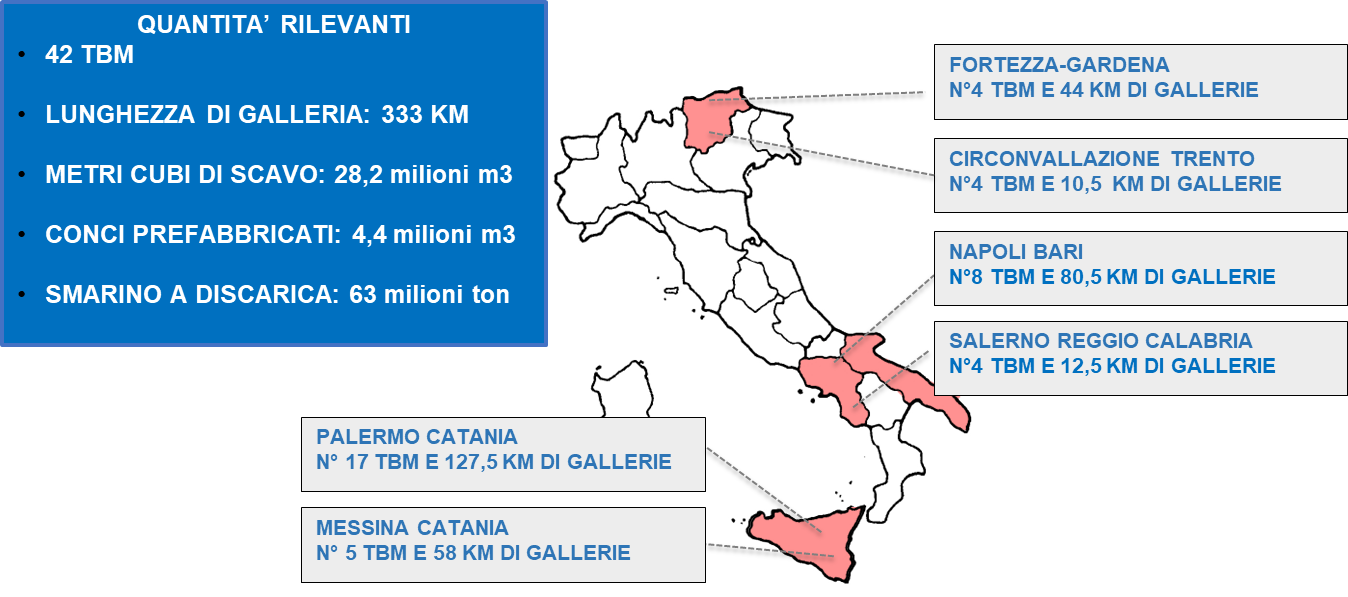
In questo momento in Italia, da un punto di vista infrastrutturale, una delle priorità è quella di realizzare e ampliare la rete ferroviaria. Ciò comporta la realizzazione di oltre 333 km di gallerie, già appaltate e aggiudicate oggi; in più ce ne saranno altre, da realizzare in cinque anni in geologie complesse.
Le formazioni geologiche italiane presentano qualsiasi tipo di difficoltà si possa immaginare. Per realizzare queste opere in un tempo limitato, quindi, si incontreranno criticità ingegneristiche e industriali. Tutta la catena, sia a livello di supply chain che di catena di produzione, è sottoposta ad una rilevante pressione. In questa circostanza è stato necessario introdurre delle nuove tecnologie per realizzare le opere previste nei tempi richiesti.
Per rispondere a questa necessità abbiamo sviluppato e proposto una serie di innovazioni legate al settore dello scavo meccanizzato che approfondiremo in questo articolo. Ne ho selezionate 11, forse tra le più importanti.
-
La tecnologia del Continuous mining
-
Le tecnologie ATEX per lo scavo in terreni grisutosi
-
Il progetto delle TBM per lo scavo in terreni convergenti
-
Lo sviluppo di sistemi di ottimizzazione dei consumi (EkoCruise) e delle performance delle TBM
-
Il sistema automatico “autosteering” di guida delle TBM
-
Il concetto di GreenTBM per ridurre i consumi di energia necessari allo scavo della galleria
-
Il getto in continuo dell’arco rovescio nel back-up della TBM
-
Il sistema di estensione dei nastri con capacità fino a 750 m (1500 m di tappeto)
-
I software per una manutenzione predittiva della TBM
-
I software per la gestione e il controllo delle performance delle TBM e di tutti gli impianti ausiliari a questa
-
Il sistema automatizzato di prefabbricazione dei conci (Robofactory)
IL CONTINUOUS MINING
Per Continuous Mining si intende il processo che permette alle macchine di montare il rivestimento in contemporaneo allo scavo e non più in sequenza. È facile intuire quanto ciò può fruttare in termini di avanzamento dell’opera. Non è però un processo semplicissimo: vanno sviluppati e messi a punto software particolari per aiutare in automatico l’operatore nel montaggio della sequenza dei conci. Ci sono poi anche temi di ingegneria, di struttura, sulla dimensionamento dei conci, l’armatura dei conci e la sicurezza. È cioè un complesso di progettazione importante.
I target sono un risparmio energetico di circa 4%: andando più veloci, infatti, si consuma meno. Sempre da un punto di vista dei consumi, una riduzione del tempo di scavo di circa il 25% consente un risparmio energetico valutato nell’1.5% del totale.
Le modalità operativa del Continuous Mining è quella standard, ci sono situazioni estreme in cui non sarà possibile utilizzarlo per il montaggio dell’intero anello.
Per questo motivo è stata studiata anche una modalità intermedia in cui è possibile montare anche solo una parte dei conci di un anello in contemporanea allo scavo ed i rimanenti in successione.
Una delle difficoltà maggiori nell’applicazione del Continuous Mining è stata che la macchina ha una spinta e un centro di spinta quando scava. Quando si monta un concio, si ritraggono i cilindri che spingono nella posizione del concio da montare e il software della macchina deve in automatico ridistribuire le pressioni per mantenere il centro di spinta. Ciò comporta che:
-
il software debba essere ottimizzato;
-
i conci sopportino delle sovra pressioni sui conci affiancati.
Come far si che il Continuous Mining funzioni bene? Abbiamo aumentato il numero di Martinetti, in modo che ritraendone tre o quattro ne rimangano sufficienti in spinta per la ridistribuzione delle pressioni. C’è poi da considerare il PLC, che non solo ridistribuisce le pressioni ma controlla anche che la pressione non superi i valori massimi o non scenda sotto valori minimi. Inoltre va tenuta sotto controllo tutta la logica di guida, basata sul centro di spinta della macchina che deve rimanere invariato.
ATEX
Quasi tutte le gallerie del sud Italia, specialmente sul tratto Napoli-Bari, Salerno-Reggio, Palermo-Catania, sono informazioni in grisutose, quindi richiedono TBM in esecuzione Atex.
L’Italia aveva visto un importante passo avanti nello scavo delle gallerie autostradali nel tratto Bologna-Firenze con l’introduzione di specifiche linee guida, pensate però in riferimento a macchine di 15 metri. Su una macchina di 10 metri gli spazi sono ridotti ed è stato necessario riadattare queste norme cercando di attualizzarle, considerando che risalgono ormai a 15 anni fa. La probabilità che si possa incorrere in qualche tipo di incidente quando ci sono 20 o 30 TBM che lavorano in contemporanea in ambienti grisuttosi è più elevata perciò lo sforzo deve essere totale per fare in modo di scongiurare qualunque tipo di complicazione.
LAYOUT DELLA MACCHINA
È un’altra innovazione di design importante su cui si è spinto molto. La macchina è progettata per avere un sistema di sovrascavo molto spinto che consenta , in pratica di aumentare il diametro di scavo quando il terreno converge al fine di limitare le pressioni sugli scudi.
Questo è associato ad una elevata conicità degli scudi, una spinta molto elevata e una lunghezza degli scudi ridotta compatibilmente con le geometrie della TBM e dei conci.
E questo è parte di un design evoluto delle macchine che stiamo proponendo.
RAFFORZAMENTO DELLO SCUDO DI CODA
Sempre pensando al layout della macchina abbiamo visto che oltre alla forza di spinta e alla coppia un elemento importante che potrebbe comportare il rischio di non riuscire a superare zone geologicamente complesse è il rischio che lo scudo di coda si deformi e quindi l’anello non si riesce più a montare tondo ma rimanga ovalizzato.
Se questo accadesse alla fine sarebbe il rivestimento cha cedere alle spinte del terreno perché danneggiato già in fase di montaggio. Quindi nelle nuove macchine abbiamo rinforzato molto la struttura dello scudo di coda in modo che possa resistere alle massime spinte di progetto della geologia.
SISTEMA DI IDRODEMOLIZIONE DINAMICA
Applicare un sistema di idrodemolizione dinamica significa dotare la macchina di un sistema di ugelli in grado di iniettare acqua in pressione a tergo degli scudi a pressioni elevate, 600 bar, mentre la macchina avanza, diminuendo drasticamente le spinte. di circa il 40%. Attraverso questa innovazione abbiamo visto che anche i terreni estremamente spingenti, la macchina non ha problemi ad avanzare ed il limite rimane la deformazione dello scudo
A questo affianchiamo l’idrodemolizione statica che vuol dire che, se anche la macchina, magari per una lunga sosta, rimane ferma diversi giorni si interviene, invece, con un’idrodemolizione a 1200-1500 bar che fino ad oggi è sempre riuscita a sbloccare la macchina. Abbiamo inoltre predisposto tre settori di iniezione di fluido bentonitico attraverso lo scudo, ciascuno con 16 ugelli per dare una maggiore lubrificazione agli scudi.
EKOCRUISE, SOFTWARE e SISTEMI DI GUIDA AUTONOMA
Negli ultimi anni abbiamo anche iniziato a parlare di automazione e di intelligenza artificiale applicata al mondo delle TBM. Abbiamo fatto un piccolo passo iniziale che è l’Eko Cruise, ovvero un software che rende la macchina in grado di regolare automaticamente i parametri di scavo per massimizzare la velocità di penetrazione e minimizzare nello stesso tempo i consumi di energia.
Abbiamo inoltre introdotto il sistema di guida autonoma e lo andremo a testare nei prossimi mesi sulla Salerno Reggio Calabria in due modalità: guida assistita, in cui l’operatore viene assistito nella guida automatica e poi nella guida autonoma in cui la TBM sarà in grado di impostare la guida in modo automatico.
Sono innovazioni che affascinano ma la loro reale utilità bisognerà capirla nella pratica. Tante volte facendo innovazione. si trovano delle utilità non ipotizzate quando le stesse innovazioni vengono implementate nella pratica.; in questo caso c’è da parte nostra l’interesse di andare vedere quale saranno i vantaggi effettivi.
Sicuramente l’operatore TBM, che ha il compito di tenere sotto controllo tantissime variabili avrà il tempo di monitorare tutti i parametri, cosa che invece, se impegnato a guidare la macchina, non riesce a fare in modo agevole. Probabilmente inoltre la precisione di guida ne beneficerà.
_________________